В Университете Иннополис занялись разработкой роботов с повышенной грузоподъемностью
Работы проводятся совместно с исследователями из южнокорейского университета KAIST.

(Казань, 17 апреля, «Татар-информ»). Ученые Университета Иннополис и южнокорейского университета KAIST занялись разработкой роботов с повышенной грузоподъемностью. Об этом сообщает пресс-служба российского IT-вуза.
Исследователи выиграли совместный грант в конкурсе на лучшие проекты фундаментальных научных исследований, проводимом РФФИ и Национальным исследовательским фондом Кореи. Из 84 претендентов победу одержали только 13.
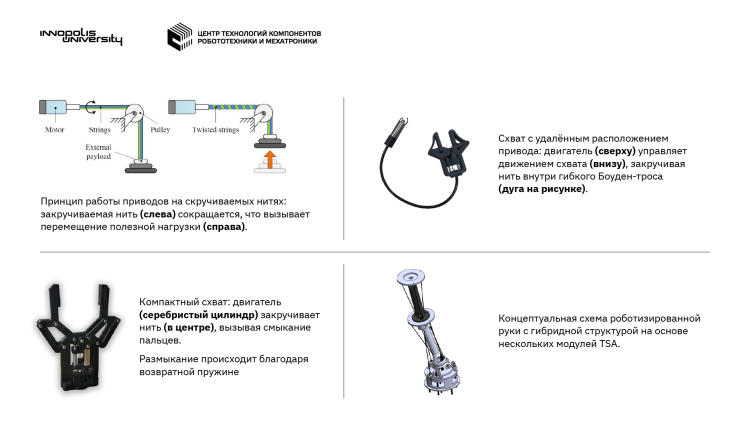
Специалисты займутся созданием робототехнических систем и манипуляторов, состоящих из звеньев параллельного типа на основе скрученных нитей – twisted string actuators (TSA). В приводах на их основе нить с одной стороны закреплена на двигателе, а с другой – подходит к рабочему механизму. Закручивающиеся нити сокращаются и приводят в движение рабочий орган.
«Данный тип приводов имеет ряд уникальных преимуществ, которые делают его привлекательным при разработке и проектировании всевозможных робототехнических систем – легкий вес, высокие развиваемые усилия, точность, гибкость при проектировании и установке», – пояснил Игорь Гапонов, руководитель Лаборатории мехатроники, управления и прототипирования Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис.
По словам эксперта, роботизированные руки с последовательной структурой, использующие традиционные приводы, могут поднимать только сравнительно небольшой груз. Соответственно, целью работ будет доведение соотношения массы устройства и его грузоподъемности с распространенных сейчас десяти к одному «хотя бы десяти к двум или десяти к трем – это уже будет прорывом».
Кроме того, twisted string actuators планируется применять на устройствах параллельного типа с большим рабочим диапазоном, также называемых дельта-роботами. Их отличают высокая скорость и сравнительно низкая грузоподъемность. Однако низкий вес TSA позволит создать более гибкие и легкие роботизированные схваты, подходящие для таких механизмов.
Работа над проектом началась в марте 2020 года и продлится до конца 2021-го. Рабочая команда состоит из 13 человек. От Университета Иннополис ею руководит Игорь Гапонов, от KAIST – профессор Джи-Хван Рю. Российский IT-вуз ответственен за разработку математического аппарата и синтез структур на основе TSA, тогда как южнокорейцы сосредоточатся на разработке адаптивной системы управления и системы на основе пассивности.
Достигнутые результаты могут быть применены при создании промышленных манипуляторов и станков, человеко-машинных интерфейсов, медицинской робототехники, экзоскелетов и так далее.